Global Navigation Satellite System (GNSS) receivers like the Emlid RS2+ offer high-precision positioning capabilities vital for surveying, mapping, and precision agriculture. We have found this workflow to be the most intuitive for surveying ground control points.
To enhance accuracy, real-time kinematic (RTK) corrections through NTRIP (Networked Transport of RTCM via Internet Protocol) are often employed. Here's a comprehensive guide on setting up NTRIP correction on the Emlid RS2+:
Step 1: Obtain NTRIP Correction
NTRIP correction involves receiving real-time corrections over the internet from a base station to improve GNSS positioning accuracy. It relies on a network of Continuously Operating Reference Stations (CORS) that broadcast correction data.
Common providers are Point One Navigation's Polaris Network, Hexagon's SmartNet and Trimble's VRS Now Network. There are many different providers out there and you should choose the one that is right for you.
Step 2: Gather Required Information
Before configuring NTRIP on your Emlid Device, ensure you have the following information:
- NTRIP caster address: The IP address or URL of the NTRIP caster providing corrections.
- Port number: The port through which the caster communicates corrections.
- Mount point: The specific data stream from the caster containing correction data.
- Username and password (if required): Some NTRIP casters may require authentication.
Step 3: Access the Emlid Flow App (Previously ReachView 3 App) and Setup your Rover
Download the Emlid Flow App.
Setup your Emlid Rover using these instructions in the Emlid help center:
2. Emlid RS3
Ensure that you connect your reach to your mobile hotspot for doing work in the field. Those instructions can be found in the articles linked above.
Step 4: Configure NTRIP Correction
1. Tap on the gear icon in the bottom right corner to access the Settings menu.
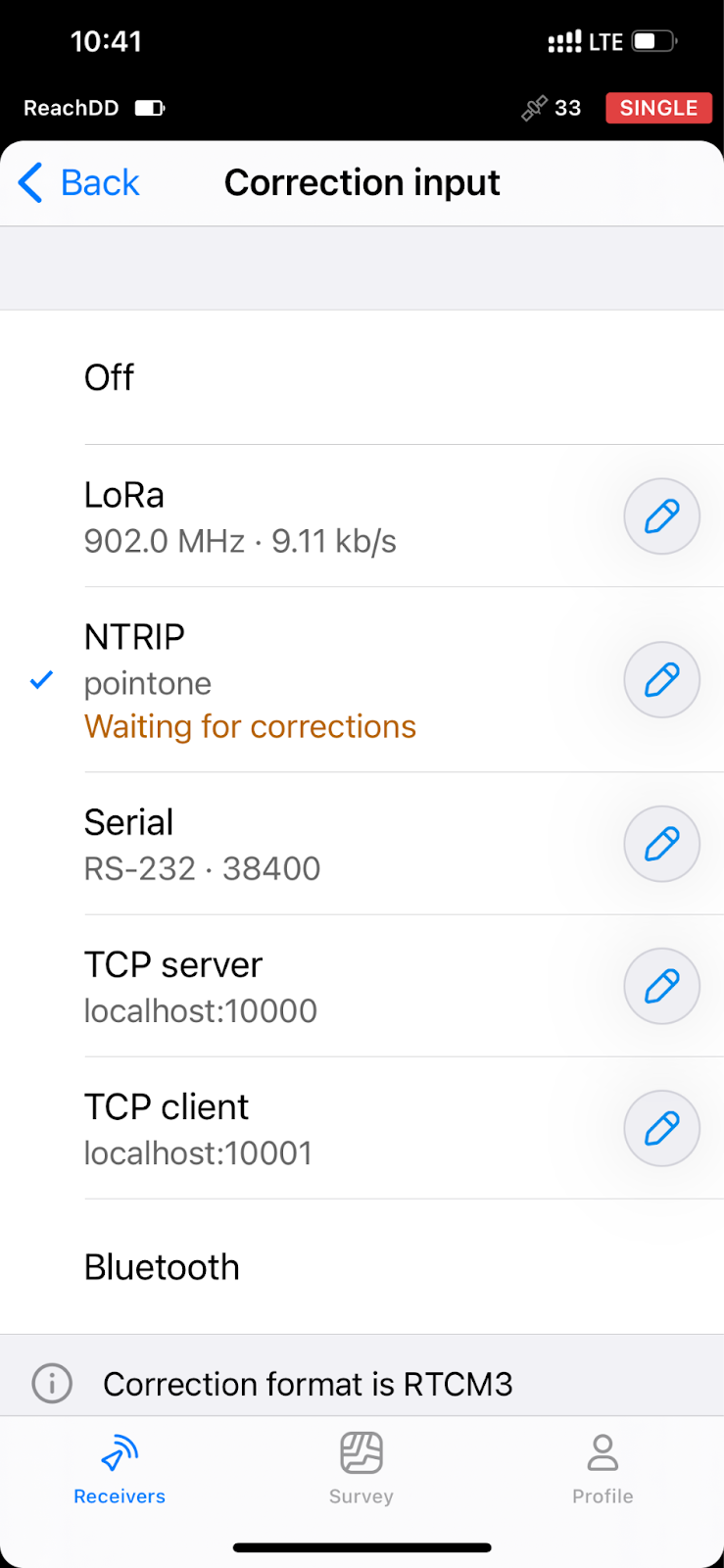
2. Select "Correction input" from the list of options.
3. Choose "NTRIP" as the correction input method.
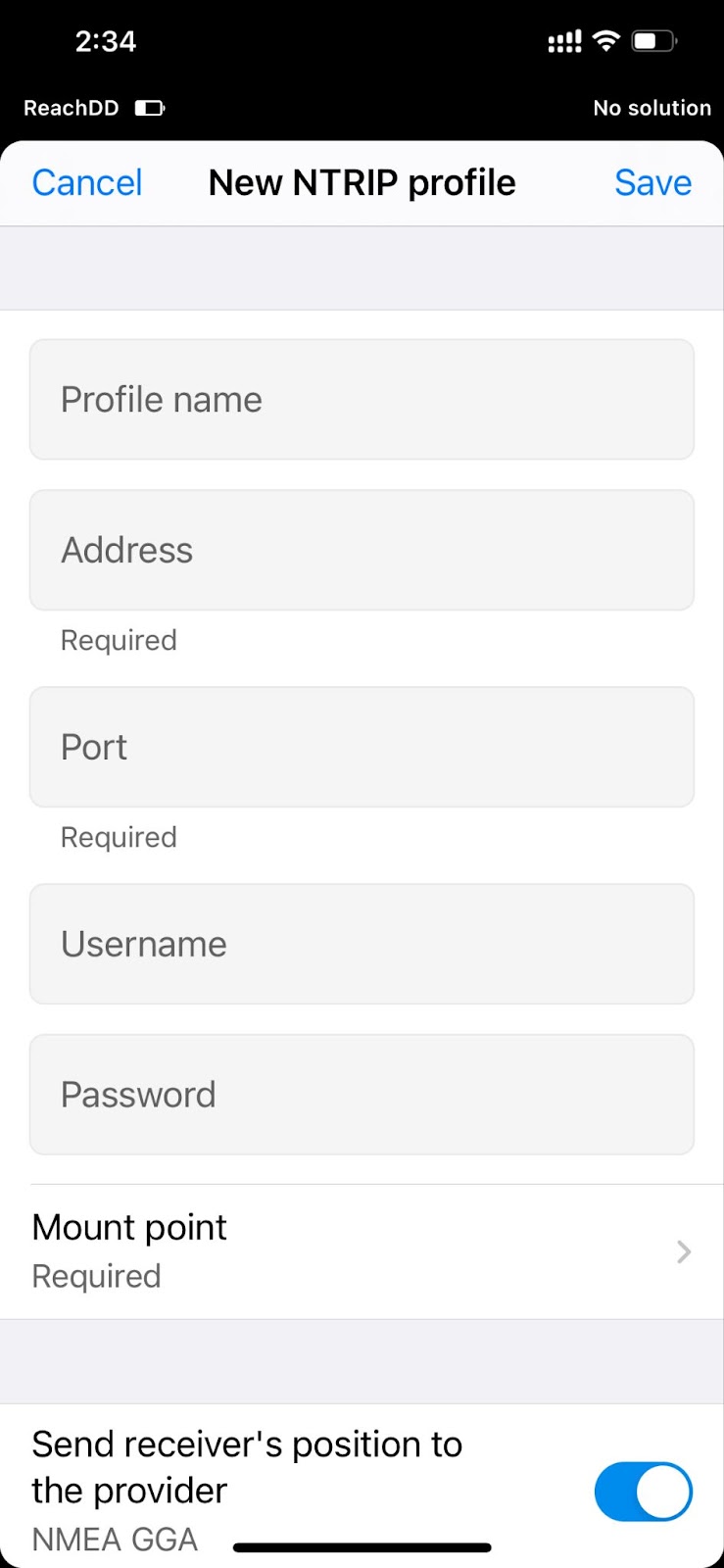
Step 5: Enter NTRIP Information
1. Input the NTRIP caster address in the designated field.
2. Enter the port number provided by the NTRIP caster.
3. Specify the mount point relevant to your location or project.
4. If authentication is required, input the username and password provided by the NTRIP caster.
Step 6: Save Settings
1. Once all information is entered correctly, tap "Save" to apply the NTRIP correction settings.
Step 7: Set GNSS settings for RTK
- Under settings, select GNSS settings
- Select Kinematic
- Set Elevation Mask Angle at 15
- Set SNR mask at 35
- Make sure GNSS has all satellite systems selected
- Set the update rate at 5hz
Step 8: Establish Connection
1. Return to the main screen of the ReachView 3 app.
2. Ensure the RS2+ has a clear view of the sky to receive GNSS signals.
3. Wait for the RS2+ to establish a connection with the NTRIP caster and receive correction data.
Step 9: Verify Accuracy
1. Once connected, monitor the accuracy displayed on the ReachView 3 app by clicking on “Status”
2. Ensure the connection has a “FIX”.
3. Make any necessary adjustments or reposition the RS2+ if accuracy is inadequate. Most of the time waiting some time or moving around (making sure there are no high structures closeby) will help to get a”FIX”
By following these steps, you can easily configure NTRIP correction on the Emlid RS2+, enabling high-precision GNSS positioning for your applications.
Step 10: Setup your Project
1. Select Survey in the bottom of the screen then the blue plus sign at the top right to create a new survey project.
2. Name your Survey project in the Emlid Flow App
3. Select your desired coordinate system and vertical datum. Note: Ensure that the rover is in a compatible coordinate system with your NTRIP provider's base station network. You will need to also ensure you select the correct mount point in the NTRIP profile for the coordinate system.
For Example, if using Point One you will want to ensure that your mount point is set to POLARIS_LOCAL is surveying points in a NAD83 coordinate system and POLARIS if using ITRF2014.
4. Input the correct type of linear units.
Start Surveying Your Points
1. Press the blue plus sign in the survey project to create a new point and then name that point
2. Place the survey pole on the center of your target, ensure it is level (RS3 has tilt compensation), and save your point.
Now that you have collected all your points you can export a CSV file directly from the Emlid Flow application.
You will then extract the Point name, Northing/Latitude, Easting/Longitude and Elevation data from the .csv file to place into one of our .csv templates for GCPs.
For information on DroneDeploy's GCP .csv requirements, see this article.
v2.2