Various factors can affect the quality of a map or cause a map to process only a portion of the intended area. To diagnose these issues, review your camera roll and compare the projections to your intended map area.
Image quality and environment
Lighting and exposure Flying in clear, bright conditions ensures images contain the detail necessary for successful stitching.
Low light: Images captured at night or on cloudy days contain less information and are harder to stitch.

Overexposed images: On very bright days, ensure the camera settings prevent overexposed pictures, especially when capturing bright structures or topography.

Fisheye lenses Fisheye lenses produce panoramic images that create non-uniform resolution around the edges. This imagery does not work well with mapping applications and should be avoided to maintain map quality.
Flight settings and overlap
Altitude Increasing your altitude is an effective way to improve the chances of stitching a successful map.
The default altitude in the DroneDeploy app is 250ft.
For tall objects, plan the flight so the highest point of the map is high relative to the object of interest rather than the ground.
Overlap Capturing imagery with a minimum overlap of 60% is essential for a high-quality map.
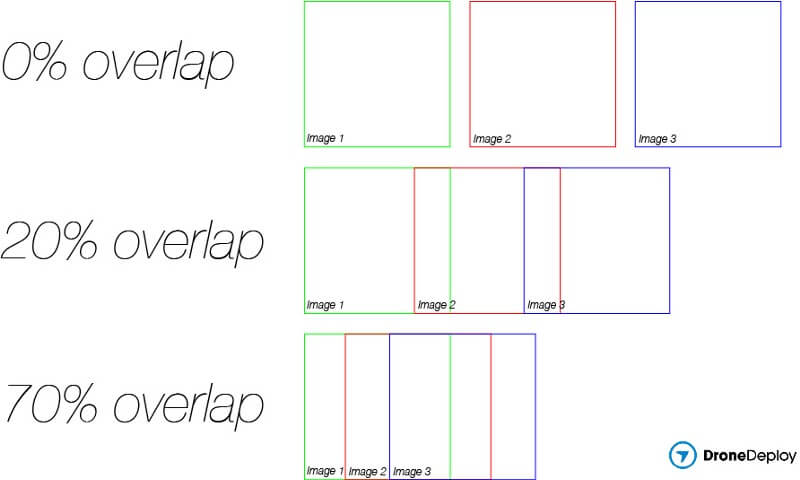
Fields and forests: For highly homogenous areas like dense forests or fields, set the frontlap and sidelap to 70% or 80%.
Flight height: If you need to achieve higher overlap, increasing your flight altitude is the recommended method.
Image composition and content
Nadir imagery To capture the data needed to stitch a map, ensure input imagery faces the ground (nadir).
Include only images taken from the drone.
Exclude images that capture the sky or the horizon.
Avoid including images taken from ground level with handheld cameras.
Mapping over water Water is difficult to map because of its constantly changing surface and light reflection.
Limit the number of images uploaded that consist exclusively of water.
For 3D reconstruction of objects in water, ensure the object is visible from at least 2 different viewpoints.
Ensure the object has enough discriminating texture to allow for successful image matching.
Technical requirements
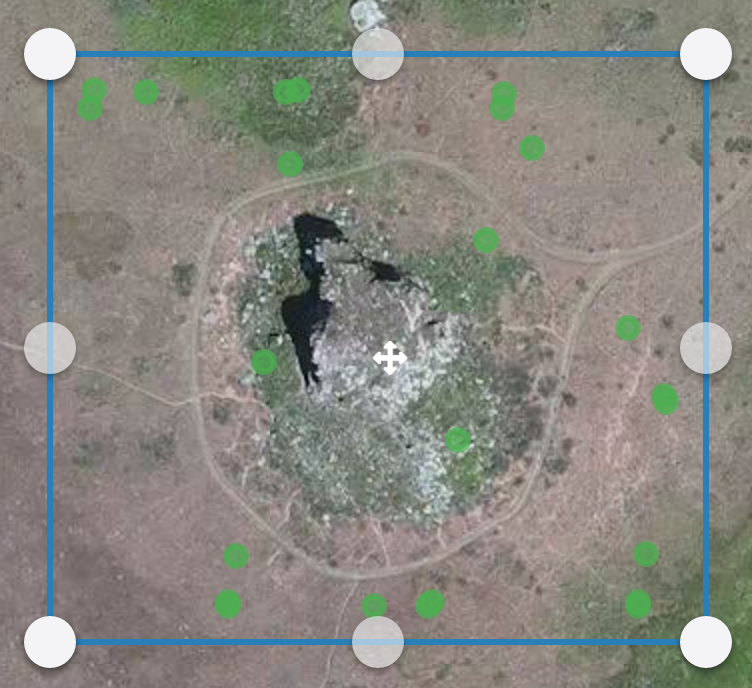
Geo-tagging DroneDeploy requires GPS information (latitude, longitude, and altitude) in the EXIF data.
When you upload to the Map Engine, image locations appear as green markers.
If markers are missing, the geotags may be unreadable.
To manually geo-tag images using Mission Planner, refer to their official documentation.
FAQs
Q: Does DroneDeploy support fisheye lenses?
A: No, fisheye imagery is not recommended due to non-uniform resolution which hinders the stitching process.
Q: What is the recommended altitude for most maps?
A: The default altitude is 250ft, which works well for most standard settings.
Q: Who do I contact for further assistance with water mapping?
A: Please contact the Support team at support@dronedeploy.com.
V2.2